Robby AI
O projektu
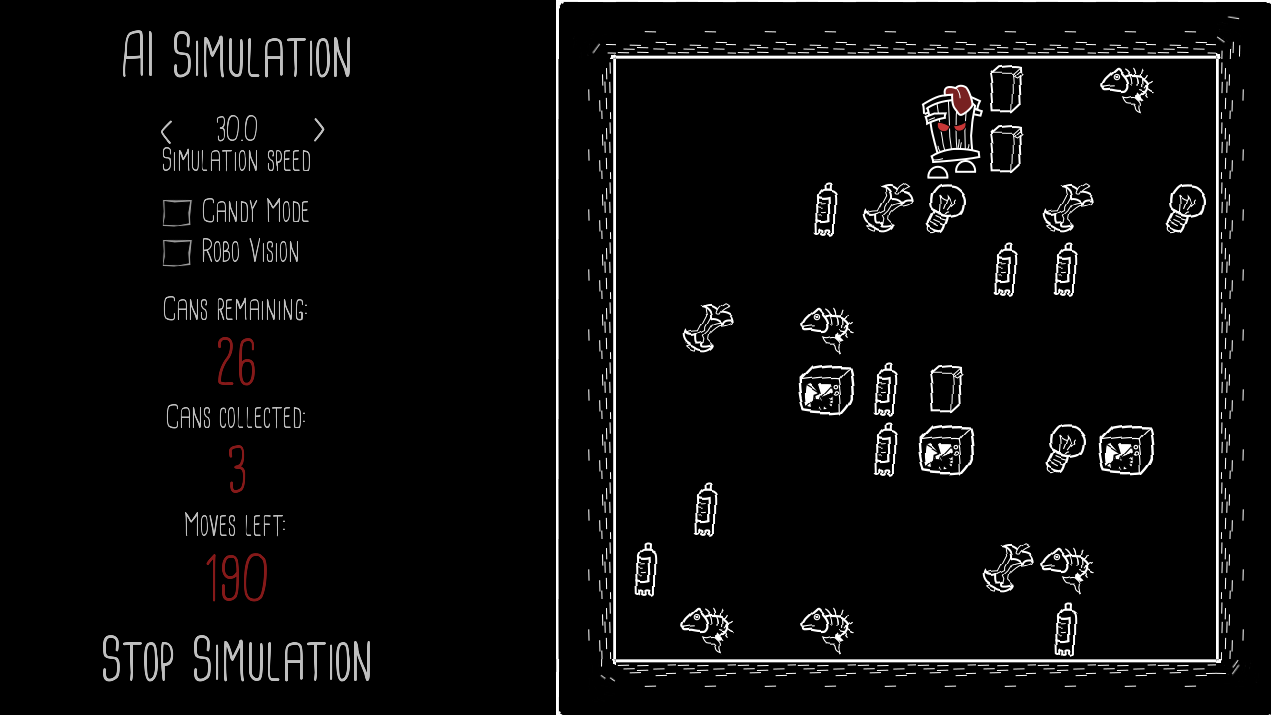
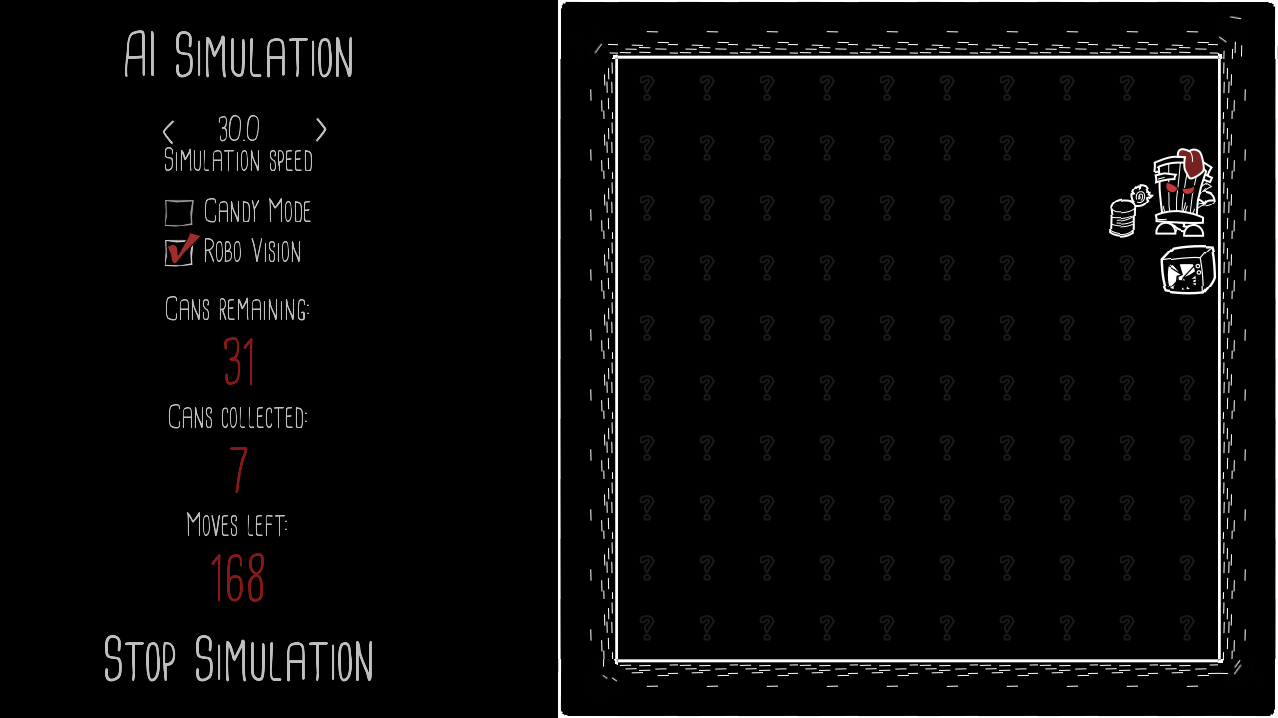
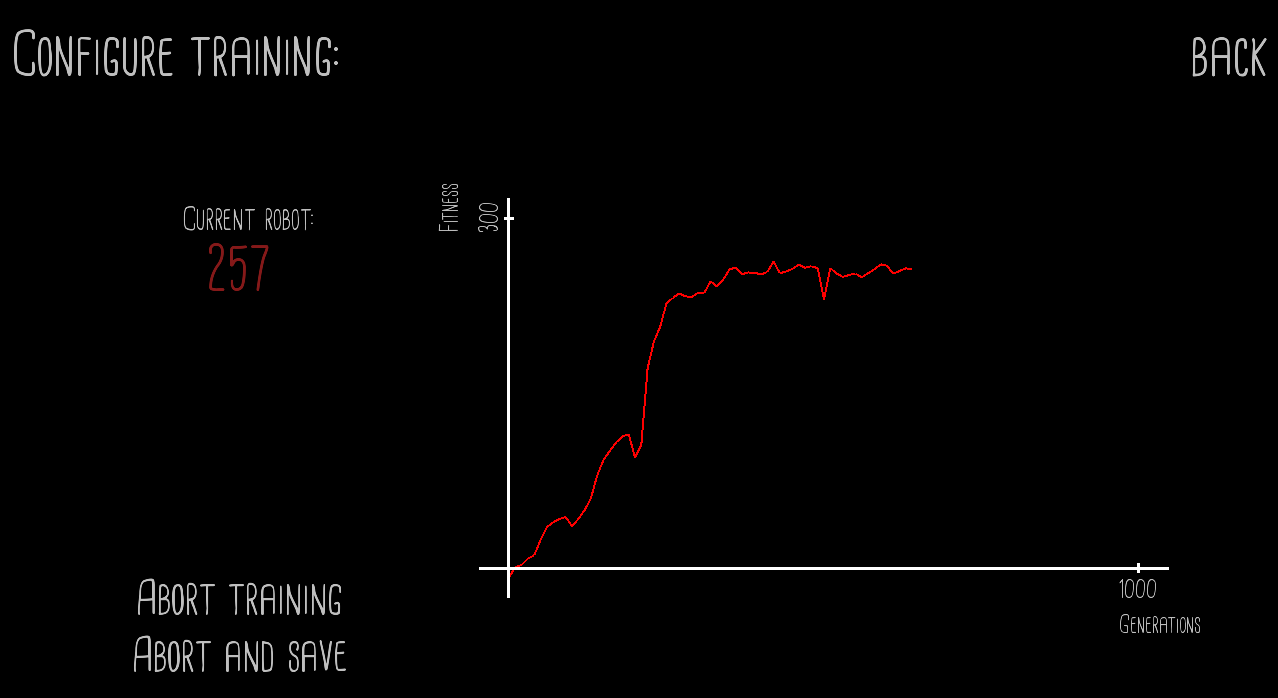
U sklopu ovog projekta smo razvijali robota "Robby" koji se nalazi u svijetu 10x10 popunjenog smecem te mu je cilj pokupiti sto vise smeca. Robby je vrlo jednostavan robot sto znaci da sljedecu akciju odreduje samo na temlju toga sto se nalazi na trenutnom i u susjednim poljima (gore, dolje, lijevo i desno).
Robota smo trenirali koristeci: genetski algoritam (izravno kodiranje percepcija-akcija, unaprijedna umjetna neuronska mreza, Elmanova umjetna neuronska mreza), genetsko programiranje te podrzano ucenje (Q-Learning).
Koristili smo programski jezik Java te libGDX za razvoj grafickog korisnickog sucelja.
Za vise detalja pogledajte dokumentaciju.
 .jar
.jar
Galerija

Tim
Dan Ambrosic (voditelj, genetski algoritam)
Stjepan Dugonjic (Q-Learning)
Mihael Medan @mihiic (neuronske mreze, dizajn)
Luka Suman (genetsko programiranje)
Nikola Zadravec (neuronske mreze)